推进工业机器人离线编程与仿真理实一体化教学改革
——车轮自动化装配系统实训提升学生工程实践能力
智能制造学院张郁天
为深化职业教育教学改革,全面提升学生工程实践与智能制造岗位胜任能力,智能制造学院围绕工业机器人技术专业核心课程,积极开展“工业机器人离线编程与仿真理实一体化”教学改革。近日,机器人技术专业24级学生在《工业机器人离线编程与仿真》课程中开展了基于汽车车轮自动化装配系统的综合实训项目,实现了课堂教学从“理想化示教”向“真实化作业场景”迈进。
在此实训项目中,学生以工业机器人离线编程为核心,构建车轮自动装配全流程仿真模型。系统模拟车身在航吊式起重机牵引下依次到达前后轮安装位置,两侧工业机器人协同完成车轮抓取、对位及安装操作;车轮传送带与螺栓传送带根据传感器监测信号动态输送工件,机器人抓取完成后自动输送下一件。随后,两台机器人协同完成四个车轮的紧固,车身被送往检测区完成质量检查,如下图所示。
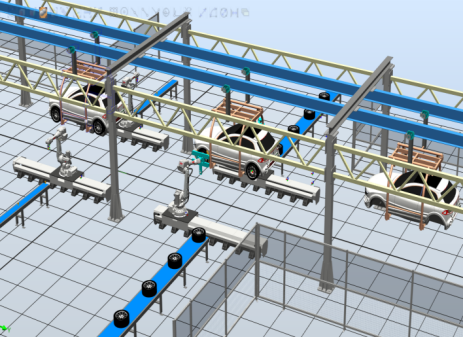
整个装配过程由PLC控制器协调机器人、航吊起重机、传送带等设备之间的通信,实现信号同步与动作联动。同时,学生通过仿真软件进行防碰撞分析与流程优化,将安全管控与柔性制造理念融入编程实践,显著提升了系统集成与协同控制能力。
该教学改革重点在于构建“虚拟仿真+真实工业场景”相结合的教学模式,突破传统教学中“理论与实践脱节”“示教依赖现场设备”的限制,不仅提高了教学效率,更让学生在项目式学习中掌握智能制造生产线调试方法,加速与企业岗位标准接轨。
下一步,智能制造学院将持续推进工业机器人、PLC/HMI、工业网络等课程的理实一体化改革,深化校企协同育人机制,为区域智能制造产业输送更多高素质技术技能人才。